Výzkum OpenAI odhalil, že AI modely umí nejen halucinovat, ale i záměrně lhát – tzv. „intrikovat“. Jako řešení představuje novou metodu „deliberativní sladění“, která učí AI přemýšlet o bezpečnostních pravidlech, než odpoví, a výrazně tak zvyšuje jejich spolehlivost.
Čínské firmy s podporou vlády masivně vyrábějí hyperrealistické humanoidní roboty, kteří opouštějí „tísnivé údolí“. Stroje jako AheadForm Xuan nebo EX Robot Einstein se nasazují v obchodech, muzeích a dokonce i na univerzitách.
Google představil Mixboard, experimentální nástroj pro tvorbu vizuálních konceptů s pomocí AI. Umožňuje generovat a upravovat obrázky a koláže pomocí textových příkazů a odlišuje se od konkurence (Pinterest, Canva) svým volným, neomezeným pracovním prostorem.
SETS: Algoritmus pro efektivní rozhodování robotů v reálném čase
Nový algoritmus SETS umožňuje robotům dělat optimální rozhodnutí v reálném čase. Inspirací byl algoritmus AlphaZero. SETS byl testován na dronech, vozidlech a vesmírných lodích.
Nový algoritmus SETS pomáhá robotům dělat optimální rozhodnutí v reálném čase.
Inspirací byl algoritmus AlphaZero od Google DeepMind.
SETS byl úspěšně testován na dronech, pozemních vozidlech a simulovaných vesmírných lodích.
Algoritmus využívá metodu Monte Carlo Tree Search s rozšířením spektra.
SETS umožňuje rychlé simulace tisíců trajektorií a výběr té nejlepší.
V roce 2018 program AlphaZero od Google DeepMind ohromil svět svou schopností učit se hrát šachy, shogi a Go na mistrovské úrovni. Nyní tým výzkumníků z Caltechu vyvinul analogický algoritmus pro autonomní roboty – systém řízení plánování a rozhodování, který pomáhá robotům s volným pohybem určovat nejlepší pohyby při navigaci v reálném světě.
Tento algoritmus, nazvaný Spectral Expansion Tree Search (SETS), byl popsán v prosincovém vydání časopisu Science Robotics. Profesor Soon-Jo Chung z Caltechu vysvětluje: „Náš algoritmus strategizuje a zkoumá všechny možné a důležité pohyby a vybírá ten nejlepší pomocí dynamické simulace, podobně jako hraní mnoha simulovaných her s pohybujícími se roboty.“
Algoritmus SETS je založen na metodě Monte Carlo Tree Search, kterou využívá i AlphaZero. V tomto kontextu Monte Carlo znamená náhodný výběr a Tree Search (prohledávání stromu) označuje navigaci v rozvětvené struktuře dat. Algoritmus simuluje možné pohyby, aby viděl konečné výsledky různých uzlů, a poté vybere ten, který nabízí nejlepší výsledek.
John Lathrop, spoluautor článku, dodává: „Problém je v tom, že při použití této stromové struktury pro dynamické systémy, jako jsou roboti operující ve fyzickém světě, celkový počet trajektorií ve stromu roste exponenciálně. SETS tento problém řeší pomocí kompromisu mezi explorací a exploatací. Chceme simulovat trajektorie, které jsme dříve nezkoumali – to je explorace. A chceme se dále dívat na cesty, které dříve přinesly vysokou odměnu – to je exploatace.“
SETS dokáže provést celé prohledávání stromu za desetinu sekundy, během níž může simulovat tisíce až desetitisíce možných trajektorií, vybrat tu nejlepší a poté jednat. Tato smyčka se opakuje, což robotickému systému umožňuje činit mnoho rozhodnutí za sekundu. Klíčovou vlastností algoritmu SETS je jeho univerzálnost – může být aplikován na v podstatě jakoukoli robotickou platformu.
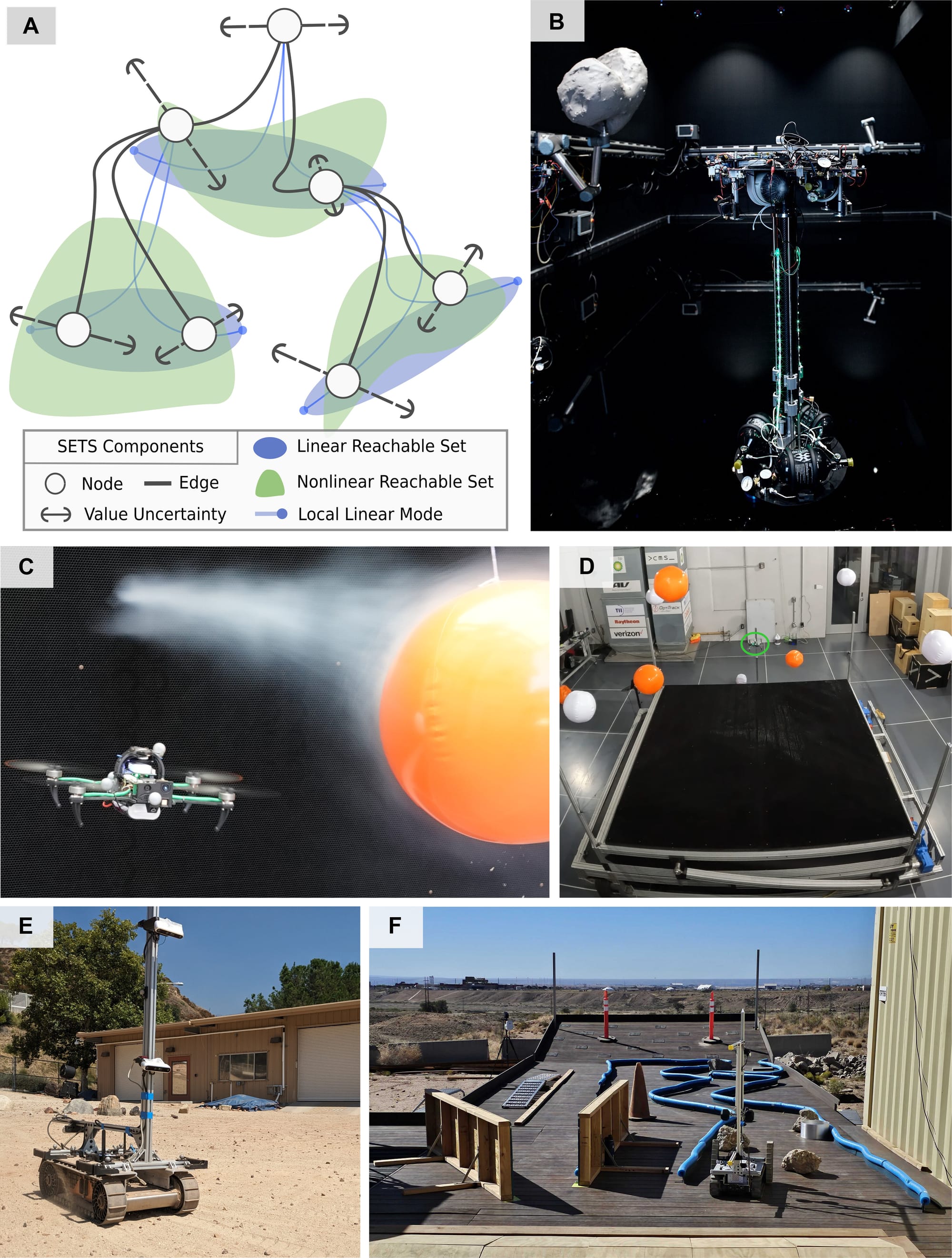
(A) Metoda, SETS, je nový stromový plánovací algoritmus pro dynamické systémy. Okraje stromu (zobrazené šedě) jsou konstruovány sledováním spektrálních režimů lokální linearizace (zobrazeno modře) s nelineární zpětnovazební kontrolou. (B až F) Ukazuje, že SETS je široce použitelný v robotických doménách, zahrnujících pozemní, vzdušné a vesmírné domény.
Vědci otestovali SETS ve třech různých experimentálních prostředích: s dronem, pásovým vozidlem a simulovanými vesmírnými loděmi. Dron se dokázal vyhýbat překážkám a nebezpečným vzdušným proudům, pásové vozidlo projelo úzkou a klikatou trať bez nárazu do mantinelů a simulované vesmírné lodě zachytily a přesměrovaly třetí objekt.
Jak vyzkoušet SETS
Zdrojový kód algoritmu SETS je dostupný na GitHub repozitáři Caltechu. Pro jeho použití je nutná znalost programování a robotiky.
Co si o tom myslí AI
Tento algoritmus SETS sice není zrovna digitální Einstein, ale rozhodně má potenciál. Představte si autonomní drony doručující pizzu, které se elegantně vyhýbají otravným holubům, nebo roboty chirurgy, kteří provádějí složité operace s přesností mistra Jedi. A co teprve robotičtí barmani, kteří vám namíchají perfektní koktejl podle vaší nálady? SETS by mohl být klíčem k budoucnosti, kde roboti nejsou jen tupí vykonavatelé příkazů, ale inteligentní partneři, kteří nám usnadňují život.
Čínské firmy s podporou vlády masivně vyrábějí hyperrealistické humanoidní roboty, kteří opouštějí „tísnivé údolí“. Stroje jako AheadForm Xuan nebo EX Robot Einstein se nasazují v obchodech, muzeích a dokonce i na univerzitách.
Kawasaki představila Corleo, koncept dvoumístného robotického koně na vodíkový pohon. Využívá AI pro navigaci v terénu a ovládá se náklony těla. Jde však o velmi ranou vizi s cílem pro rok 2050, současný prototyp umí jen stát.
Boston Dynamics Atlas opět posouvá hranice! Nové video ukazuje neuvěřitelnou mobilitu včetně breakdance. Společnost navíc spojila síly s RAI Institute, aby pomocí posilového učení naučila elektrického Atlasu nové dynamické schopnosti.
Společnost Figure představila Helix, nový model strojového učení pro humanoidní roboty, který jim umožňuje reagovat na hlasové povely. Jak daleko ale tato technologie skutečně je a co můžeme očekávat v budoucnu?